Designing an intuitive Path-planning system for an Autonomous street cleaning robot.
Designing an intuitive Path-planning system
for an Autonomous street cleaning robot.
Designing an intuitive Path-planning system for an Autonomous street cleaning robot.
How I redesigned a robotics workflow to cut friction and
boost clarity.
How I redesigned a robotics workflow to cut friction and
boost clarity.

PATHPLANNER
feature request, check out the early adoption of PATH PLANNER
PATH PLANNER
Lead designer. I led the end to end design process in close collaboration with pm, engineering and trombia.
BACKGROUND
Trombia Technologies, makers of autonomous street cleaners, partnered with us to adapt my 3D module into a path planning tool. I transformed complex robotics data into an intuitive interface for operators to plan and control urban cleaning routes.
Trombia Technologies, makers of autonomous street cleaners, partnered with us to adapt my 3D module into a path planning tool. I transformed complex robotics data into an intuitive interface for operators to plan and control urban cleaning routes.
Trombia Technologies, makers of autonomous street cleaners, partnered with us to adapt my 3D module into a path planning tool. I transformed complex robotics data into an intuitive interface for operators to plan and control urban cleaning routes.
PROBLEM
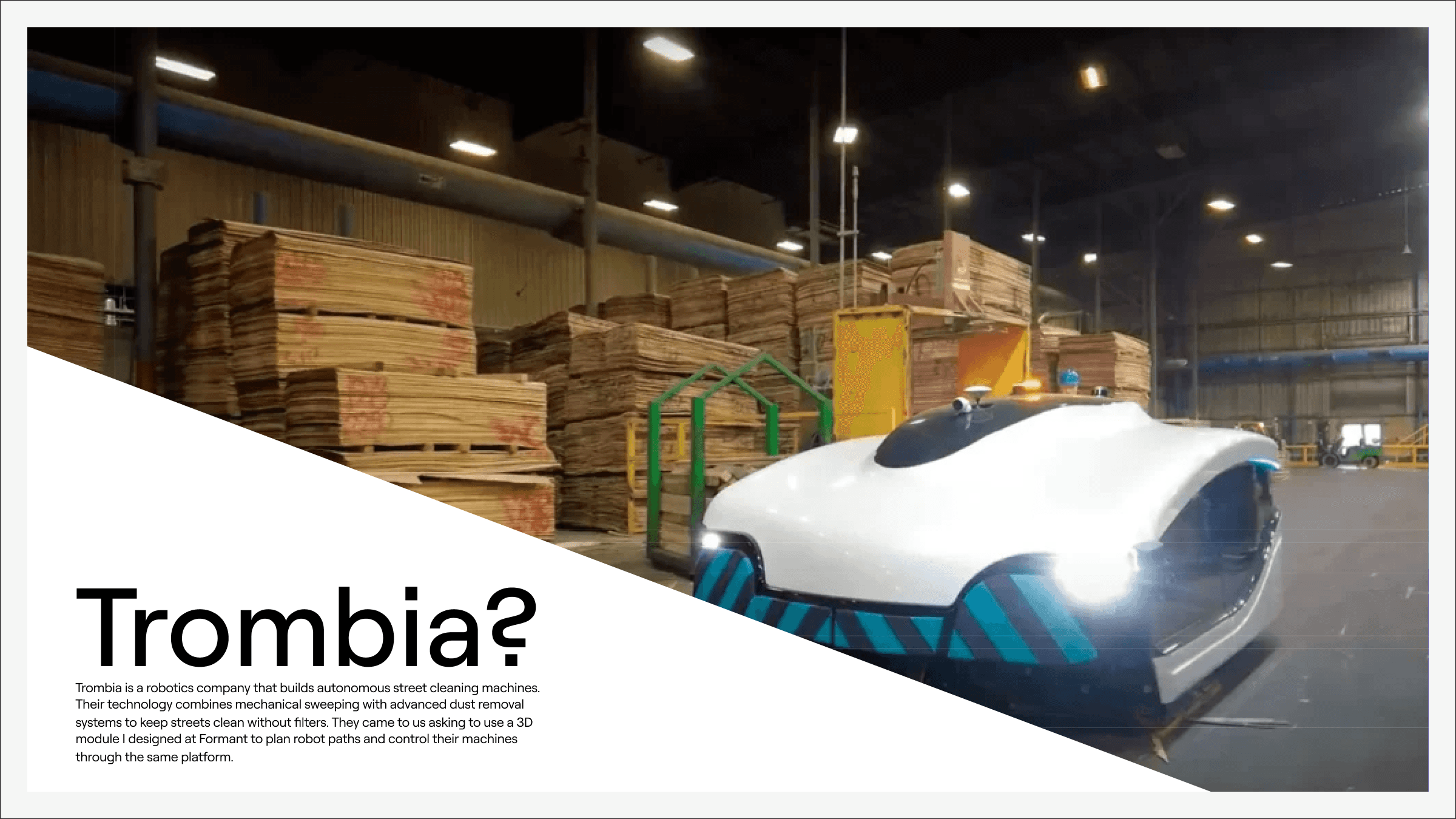
Trombia’s outdated workflow
relied on disconnected modules and inconsistent metadata, leading to user confusion and frequent errors. As they scaled, these inefficiencies created friction that slowed mission planning and execution.
Robotics operators faced delays and inefficiencies due to disconnected tools and complex interfaces. Without a unified visualization solution, critical spatial data remained inaccessible to many users.
FRAGMENTS
A fragmented workflow requiring several disconnected tools to create and deploy robot missions.
INCONSISTENCY
Inconsistent and confusing metadata, making
it difficult for users to know what they were configuring.
NO FEEDBACK
No clear feedback or confirmation, leaving
users uncertain whether missions were successfully received.
SCALABILITY ISSUES
Low scalability and high error rates, especially as
the company expanded robot deployments.
PROCESS
USER JOURNEY
Researched the user and their context then I broke down Trombia desired workflow of sending robots on mission
to help identify where in their existing approach broke down.
REAL-TIME
Designed features that allowed users to see the actual path a robot would take, monitor its live position during a mission, and make adjustments as needed.
WAYPOINT
Studied Trombia's waypoint system &
did outside research to help redesign
a more intuitive interface that allowed
users to easily visualize, edit and
execute missions.
ADAPTATION
While the design was driven by Trombia’s needs, I made sure the solution was modular & scalable, so other customers could benefit from the same path planning experience within our platform.
COLLAB
Worked with Midori to validate data flows, edge cases, and system constraints, ensuring that what we designed could be built accurately and perform reliably in real-world scenarios.
THE OUTCOME


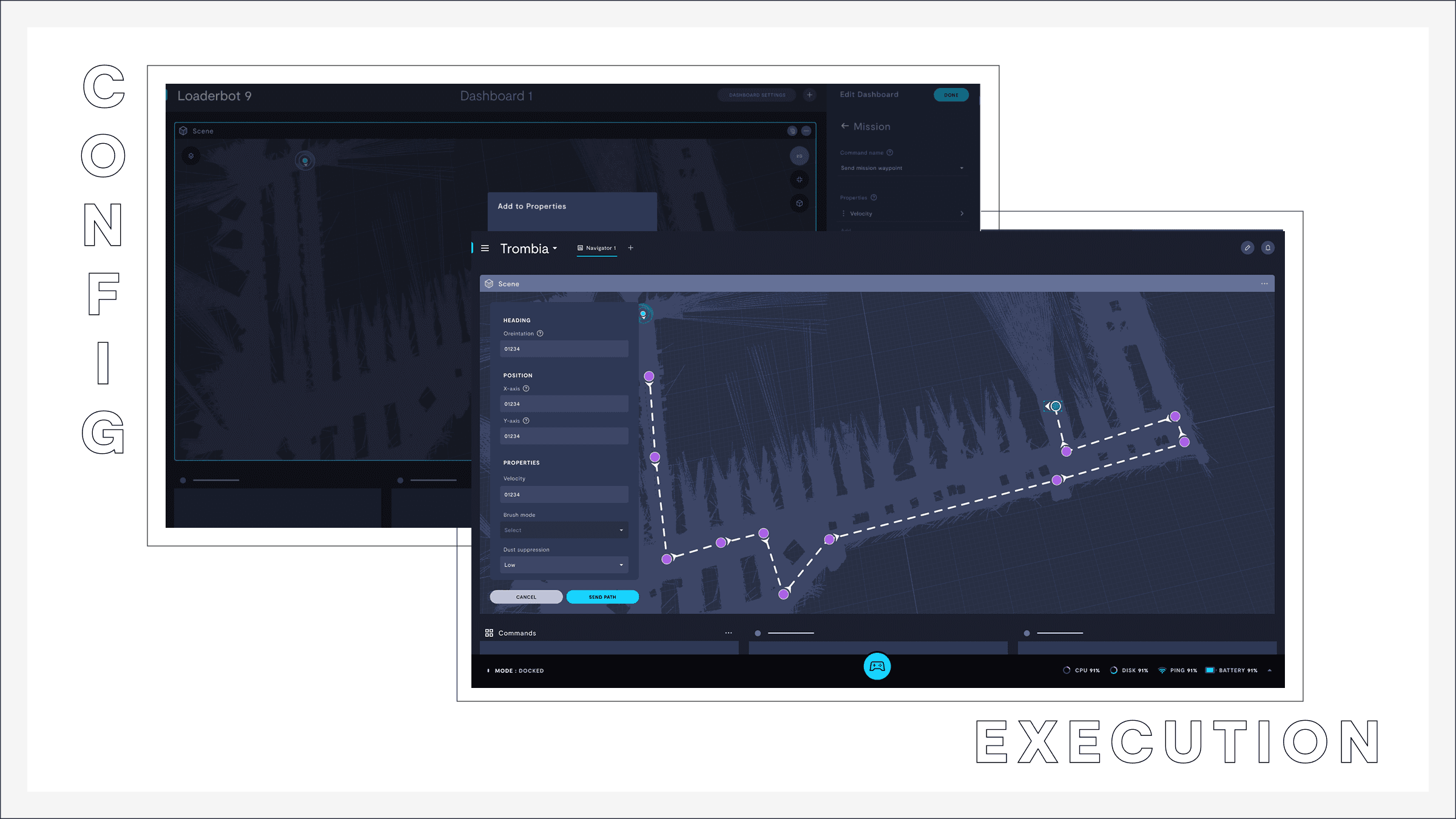
The new path planning experience replaced Trombia’s fragmented system with a unified, intuitive workflow. It streamlined configuration, added real-time feedback, and made mission planning more reliable and scalable. After launch, Trombia adopted it company-wide, and other platform users followed, highlighting its broader impact.
The new path planning experience replaced Trombia’s fragmented system with a unified, intuitive workflow. It streamlined configuration, added real-time feedback, and made mission planning more reliable and scalable. After launch, Trombia adopted it company-wide, and other platform users followed, highlighting its broader impact.
The new path planning experience replaced Trombia’s fragmented system with a unified, intuitive workflow. It streamlined configuration, added real-time feedback, and made mission planning more reliable and scalable. After launch, Trombia adopted it company-wide, and other platform users followed, highlighting its broader impact.
STREAMLINED INTERFACE
A streamlined, immersive interface for configuring missions and placing waypoints visually on our 3D module.
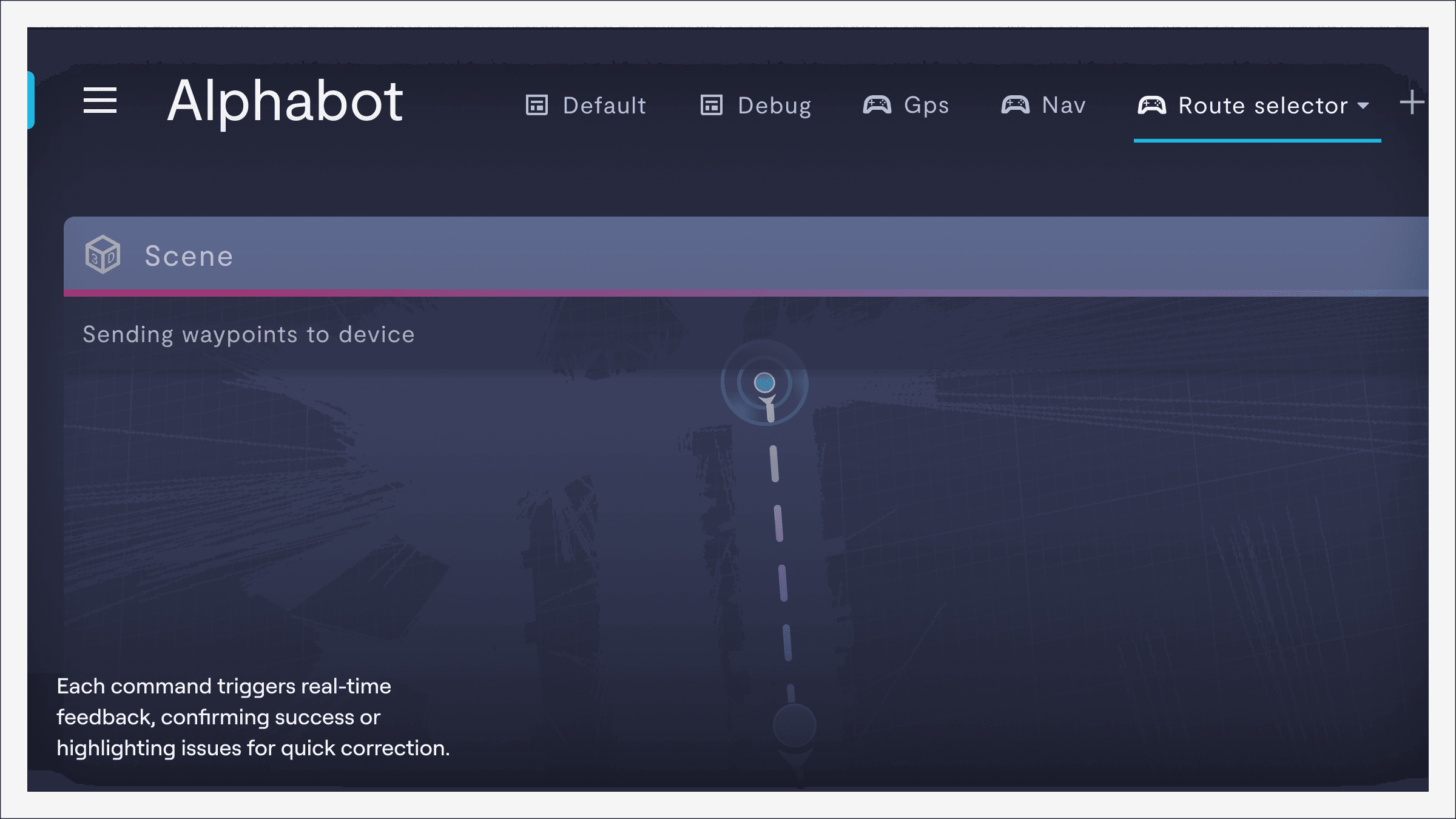
FEEDBACK
Clear confirmation and error feedback, reducing user frustration and uncertainty during critical tasks.
FEATURE ADAPTATION
Broader adoption across multiple companies, proving the design’s scalability and utility beyond the initial client.
NEW TOOL
Introduction of a gizmo tool for easier waypoint editing, enhancing usability and reducing reliance on side panels.
THE CHALLENGE
The project faced several challenges in transforming Trombia’s outdated workflow into a clear, reliable experience.
The project faced several challenges in transforming Trombia’s outdated workflow into a clear, reliable experience.
The project faced several challenges in transforming Trombia’s outdated workflow into a clear, reliable experience.
META DATA
Understanding Trombia’s complex metadata system. They used different data types with technical engineering terms, making it hard for users to know what they were actually configuring.
FEEDBACK
One major challenge was handling cases where the robot might fail to receive a mission. I had to design clear feedback that reduced user anxiety and guided next steps.
NAMING CONVERSION
I had to convince the team to use Path Planner instead of Mission Planning to better match the user’s mental model and avoid confusion with existing product terms.
USER
JOURNEY
Researched the user and their context then I broke down Trombia desired workflow of sending robots on mission to help identify where in their existing approach broke down.
REAL-TIME
Designed features that allowed users to see the actual path a robot would take, monitor its live position during a mission, and make adjustments as needed.
WAYPOINT
Studied Trombia's waypoint system & did outside research to help redesign a more intuitive interface that allowed users to easily visualize, edit and
execute missions.
ADAPT
While the design was driven by Trombia’s needs, I made sure the solution was modular & scalable, so other customers could benefit from the same path planning experience within our platform.
COLLAB
Worked with Midori to validate data flows, edge cases, and system constraints, ensuring that what we designed could be built accurately and perform reliably inreal-world scenarios.
COLLAB
Worked with Midori to validate data flows, edge cases, and system constraints, ensuring that what we designed could be built accurately and perform reliably in real-world scenarios.
DELIVER
Built interactive prototypes testing different visualization approaches, refined the interface through user feedback, and delivered a comprehensive 3D Scene Module with intuitive mouse controls and flexible
layer management.
PROCESS
PROCESS
USER JOURNEY
Researched the user and their context then I broke down Trombia desired workflow of sending robots on mission
to help identify where in their existing approach broke down.
REAL-TIME
Designed features that allowed users to see the actual path a robot would take, monitor its live position during a mission, and make adjustments as needed.
WAYPOINT
Studied Trombia's waypoint system &
did outside research to help redesign
a more intuitive interface that allowed
users to easily visualize, edit and
execute missions.
ADAPTATION
While the design was driven by Trombia’s needs, I made sure the solution was modular & scalable, so other customers could benefit from the same path planning experience within our platform.
COLLAB
Worked with Midori to validate data flows, edge cases, and system constraints, ensuring that what we designed could be built accurately and perform reliably in real-world scenarios.
DELIVER
While the design was driven by Trombia’s needs, I made sure the solution was modular & scalable, so other customers could benefit from the same path planning experience within our platform.
BACKGROUND
Trombia Technologies, makers of autonomous street cleaners, partnered with us to adapt my 3D module into a path planning tool. I transformed complex robotics data into an intuitive interface for operators to plan and control urban cleaning routes.
PROBLEM
Trombia’s outdated workflow relied on disconnected modules and inconsistent metadata, leading to user confusion and frequent errors. As they scaled, these inefficiencies created friction that slowed mission planning and execution.
FRAGMENTS
A fragmented workflow requiring several disconnected tools to create and deploy robot missions.
INCONSISTENCY
Inconsistent and confusing metadata, making
it difficult for users to know what they were configuring.
NO FEEDBACK
No clear feedback or confirmation, leaving
users uncertain whether missions were successfully received.
SCALABILITY ISSUES
Low scalability and high error rates, especially as
the company expanded robot deployments.
PROCESS
USER JOURNEY
Researched the user and their context then I broke down Trombia desired workflow of sending robots on mission
to help identify where in their existing approach broke down.
REAL-TIME
Designed features that allowed users to see the actual path a robot would take, monitor its live position during a mission, and make adjustments as needed.
WAYPOINT
Studied Trombia's waypoint system &
did outside research to help redesign
a more intuitive interface that allowed
users to easily visualize, edit and
execute missions.
ADAPTATION
While the design was driven by Trombia’s needs, I made sure the solution was modular & scalable, so other customers could benefit from the same path planning experience within our platform.
DEVELOP
Studied Trombia's waypoint system &
did outside research to help redesign
a more intuitive interface that allowed
users to easily visualize, edit and
execute missions.
COLLAB
Worked with Midori to validate data flows, edge cases, and system constraints, ensuring that what we designed could be built accurately and perform reliably in real-world scenarios.
THE OUTCOME
The new path planning experience replaced Trombia’s fragmented system with a unified, intuitive workflow. It streamlined configuration, added real-time feedback, and made mission planning more reliable and scalable. After launch, Trombia adopted it company-wide, and other platform users followed, highlighting its broader impact.
STREAMLINED INTERFACE
A streamlined, immersive interface for configuring missions and placing waypoints visually on our 3D module.
FEEDBACK
Clear confirmation and error feedback, reducing user frustration and uncertainty during critical tasks.
FEATURE ADAPTATION
Broader adoption across multiple companies, proving the design’s scalability and utility beyond the initial client.
NEW TOOL
Introduction of a gizmo tool for easier waypoint editing, enhancing usability and reducing reliance on side panels.
THE CHALLENGE
The project faced several challenges in transforming Trombia’s outdated workflow into a clear, reliable experience.
META DATA
Successfully created a single interface where users could layer multiple data streams (point clouds, GPS, URDF models) eliminating the need to switch between disconnected tools.
FEEDBACK
Designed intuitive mouse-based controls and clear visual hierarchies that enabled both technical engineers and non-technical stakeholders to access critical robotics data.
NAMING CONVERSION
Operators could now quickly assess their robots'
spatial understanding and environmental context
during live operations, improving decision-making
speed and accuracy.
SCALABLE SOLUTION ACROSS INDUSTRIES
Delivered a flexible platform that successfully served diverse customer needs from delivery robots to industrial automation, supporting Formant's growth across multiple robotics sectors.